 alexxlab
alexxlab Круги стальные калиброванные по ГОСТ: Описание и характеристики
Калиброванный круг представляет собой одну из разновидностей металлопроката. Он исполняется в виде прута с различным диаметром и длиной, а в поперченном сечении имеет круг.
На сегодняшний день, на Российском рынке такой вид продукции металлопроката как круг калиброванный, очень распространен. При изготовлении круга горячекатаного может использоваться легированная сталь, низколегированная, углеродистая и высоко-углеродистая сталь, что определяет его основные технические характеристики.
Круг калиброванный в основном используется в машиностроении, в сельскохозяйственной отрасли, и во всех смежных отраслях механической обработки и строительстве.
Круг калиброванный поставляется в виде стержней круглого сечения диаметром от 5 мм до 270 мм. Регламентирует основные характеристики и технологию производства круга действующий ГОСТ 2590-2006,и ТУ 14-1-2118-98.
Для изготовления круг горячекатаного используются марки стали Ст3, Ст2, Ст5, конструкционные марки Ст10, Ст20, Ст35, Ст45, Ст40Х, низколегированные Ст09Г2с, Ст25ХСНД и другие.
Стержни бывают мерной, мерной кратной и не мерной длины, а также произвольной длины по индивидуальному согласованию с заказчиком. ГОСТом также регламентировано максимальной допустимое отклонение длины стержня, которое не должно превышать 50 мм.
Данный вид изделий выпускается в трех основных стандартах:
- высокой точности (маркировка «А») – максимальные допустимые отклонения в размере составляют от -0,9 мм до +0,3 мм;
- повышенной точности (маркировка «Б») – максимальные допустимые отклонения в размере составляют от -2 мм до +0,6 мм;
- обыкновенной точности (маркировка «В») – максимальные допустимые отклонения в размере составляют от -4 мм до +0,8 мм.

У нас можно купить Круг калиброванный в любых количествах. Компания оказывает и дополнительные услуги: отгрузка товара, транспортировка, информационная поддержка. Постоянные клиенты могут рассчитывать на преференциальные условия сотрудничества. У нас цена круга горячекатаного зависит не от капризов менеджеров, а от объективных факторов. Это и состояние дел на рынке металлов, колебания валютных котировок и многое другое.
| Способ изготовления | Размер | НТД |
| Катаный | 8-300 мм | ГОСТ 2590-88, ТУ 14-136-347-2001 |
| Кованый | 60-1000 мм | ГОСТ 1133-71 |
| Трубная заготовка | 80-200 мм | ОСТ 14-21-77, ТУ 14-1-1529-93 |
| Калиброванный | 2-80 мм | ГОСТ 7417-75 |
Со спец. oтделкой поверхности oтделкой поверхности |
1,2-47 (шлифованный Б, В, Г, Д h9-h21) | ГОСТ 14955-77 |
| 13-120 (полированный Б, В h9-h22) |
Круг стальной кованый: особенности и применение
По-другому, эту деталь могут называть круглая поковка. Это наиболее дорогое и качественное изделие. Такой способ изготовления позволяет выпускать детали очень больших размеров:
- толщиной до 1 метра,
- длиной до 1,5 метров.
К тому же кованые прутки с круглым сечением имеют отличные технические характеристики и высокие прочностные показатели. Во время эксплуатации они способны выдерживать большие нагрузки и применяться в различных климатических условиях: от сурового крайнего севера до жаркого юга.
Такие изделия широко используются при производстве разного инструмента, а также иных деталей, к которым предъявляются требования повышенного качества.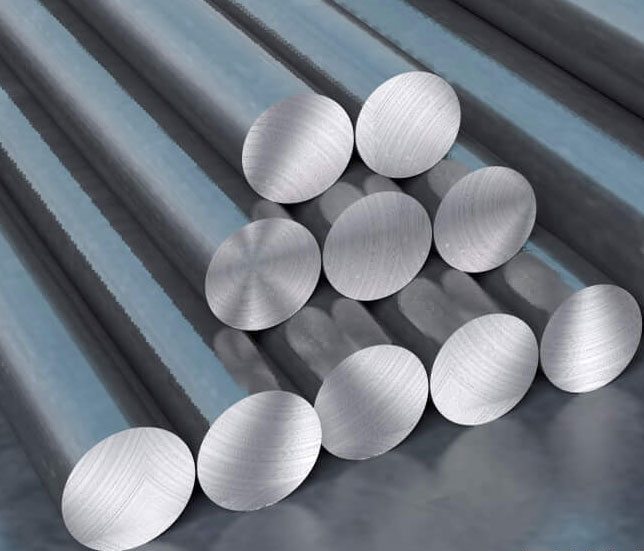
Круг стальной калиброванный: применение и технические характеристики
Калиброванные прутки с круглым сечением получают из круглого горячекатаного проката. Для их изготовления применяется один из двух способов:
- волочение,
- холодная прокатка.
Волочение. При этом варианте производства обработка металла осуществляется под давлением. Заготовку протягивают через круглое отверстие, диаметр которого меньше сечения заготовки.
В процессе длина изделия увеличивается, а его поперечные размеры уменьшаются. Такой способ применяют в производстве следующих изделий: трубы, прутки и проволока.
Холодная прокатка. Стальные круги, выпущенные этим способом имеют 2 весомых преимущества. Во-первых, по необходимости можно изготовить детали с очень маленьким сечением. Во-вторых, подобные изделия имеют отличное качество по всем показателям: точные размеры, отделка поверхности, механические свойства.
Преимущества калиброванных металлических кругов
Особенно гладкая и чистая поверхность.
В процессе дополнительной обработки с поверхности изделия удаляются окалины и «заусенцы», заглаживаются микротрещины и выравниваются закаты.
Соответствие параметров цена/качество.
Естественно, что стоимость калиброванных стальных кругов на порядок выше цены обычных подобных изделий. Поскольку здесь применяется ряд дополнительных производственных процессов, которые существенно повышают технические свойства и улучшают эксплуатационные характеристики готового изделия.
Возможность улучшения качества изделия при помощи дополнительной обработки.
Например, по вашему желанию может быть дополнительно упрочнена поверхность металлического круга. Делается это при помощи наклепа. В результате вы приобретаете нагартованный калиброванный металлопрокат.
Или вы можете заказать специальную отделку поверхности. Например, ее дополнительное шлифование или полирование. Тогда поверхность становится еще более ровной, блестящей и гладкой.
Например, ее дополнительное шлифование или полирование. Тогда поверхность становится еще более ровной, блестящей и гладкой.
Круг стальной горячекатаный: применение и технические особенности
Это один из самых распространенных и востребованных видов металлопроката. Обусловлено это тем, что стальные горячекатаные прутки с круглым сечением давно стали универсальным материалом.
Они обладают высокими техническими характеристиками: прочность, надежность, удобный размер сечения. Благодаря этому, применяются в строительной и производственной сфере, в машиностроении, и даже в космической промышленности.
Калиброванный прокат, круг из легированной конструкционной стали
Описание
Еще одна из профильно производимых ООО «Константиновский метизный завод» групп товаров — качественная конструкционная легированная калиброванная сталь круглого сечения (круг калиброванный) марок 15Х, 20Х, 35Х, 40Х, 45Х, 18ХГТ, 25ХГТ и др. Изготовливается в соответствии с требованиями ДСТУ 8608:2015 (взамен ГОСТ 7417-75, прокат калиброванный круглого сечения, сортамент), ДСТУ 7806:2015 (взамен ГОСТ 4543-71, прокат из легированной конструкционной стали), состояние – нагартованная. Для кругов диаметрами до 30 мм. возможна поставка в отожженном состоянии, либо с нормируемой твердостью.
Для кругов диаметрами до 30 мм. возможна поставка в отожженном состоянии, либо с нормируемой твердостью.
Калиброванный прокат круглого сечения (калиброванный круг) характеризуется приведенными ниже основными параметрами:
- Размер калиброванного круга, который подразумевает под собой диаметр сечения (окружности). Измеряется и прописывается в миллиметрах;
- Калиброванный прокат круглого сечения (круг калиброванный) имеет сортовой квалитет, который обозначается латинской буквой «h» и цифрой справа от 9 до 12. Чем меньше цифра, тем жестче допуски к размеру и калиброванный круг точнее в геометрических показателях своего сечения. Измеряется в сотых долях миллиметра.
- Наличие дефектов поверхности (как-то, волосовины, риски, остатки окалины, трещины и т.п.) строго регламентировано и в зависимости от их количества и характера определяет группу качества поверхности калиброванного проката (для групп калиброванный круг, квадрат и шестигранник).
 Группы обозначаются заглавными буквами кириллицы и от высшей к низшей бывают приведенных видов А, Б, В.
Группы обозначаются заглавными буквами кириллицы и от высшей к низшей бывают приведенных видов А, Б, В. - Состояние поставки. Калиброванный прокат (круг, шестигранник и квадрат) в основном и по умолчанию поставляется в нагартованном состоянии. Это состояние приобретается при холодном волочении, придающем прокату особые механические свойства. Речь о более высокой прочности и твердости, которая, к тому же неравномерно распределяется в толще проката. Для изменения этих свойств и достижения необходимых применяют разные режимы термообработки, как-то светлый и темный отжиги, нормализация, отпуск, сфероиодизирующий отжиг и т.д. и т.п. После прохождения этих процедур калиброванный прокат меняет состояние поставки на «отожженный» или «термообработанный».
- Длина проката. Калиброванный прокат круглого сечения может поставляться в прутках немерной и мерной длин, а также в мотках (бухтах, бунтах)Измеряется в мм и подразумевает под собой длину отдельно взятой штанги из партии металлопроката (в случае поставки в прутках).
 Показатели длин также строго регламентированы нормативными документами (вкладка «нормативная документация»).
Показатели длин также строго регламентированы нормативными документами (вкладка «нормативная документация»).
Качество каждой партии производимой продукции подтверждается сертификатами центральной заводской лаборатории. Подробнее: https://kmztov.com/kachestvo-i-sertifikacziya/
Характеристики
| Диаметр сечения | от 4 мм. до 45 мм. |
| Марки стали | 15Х, 20Х, 35Х, 40Х, 45Х, 18ХГТ, 25ХГТ и др. |
| Доступные сортовые квалитеты | h20, h21, h22 |
| Доступные группы качества поверхности | Б, В |
| Поставка в нагартованном состоянии | круги диаметрами сечений от 4 мм. до 45 мм. |
| Поставка в отожженном состоянии | круги диаметрами сечений от 4 мм. до 30 мм. |
| Поставка с нормируемой твердостью | круги диаметрами сечений от 4 мм. до 30 мм. |
| Поставка в мотках | круги диаметрами сечений от 4 мм. до 15 мм. до 15 мм. |
| Поставка в прутках мерной (кратной) длины | круги диаметрами сечений от 4 мм. до 30 мм. |
| Поставка в прутках н/дл. | круги диаметрами сечений от 4 мм. до 45 мм. |
Объяснение шаблонов калибровки — calib.io
Точная калибровка камер важна для успеха любой настройки машинного/компьютерного зрения. Тем не менее, есть разные модели на выбор. Чтобы облегчить вам выбор, в этой статье объясняются основные преимущества каждого из них.
Подборка шаблонов калибровки, которые мы предлагаем на Calib.io. CharuCo, шахматная доска, асимметричные круги и шахматная доска.
Размер шаблона
При выборе калибровочной пластины важным фактором является ее физический размер. В конечном итоге это относится к измерению поля зрения (FOV) конечного приложения. Это связано с тем, что камеры должны быть сфокусированы на этом конкретном расстоянии и откалиброваны. Изменение фокусного расстояния незначительно влияет на фокусное расстояние, что может сбить любую предыдущую калибровку. Даже изменения диафрагмы обычно отрицательно сказываются на достоверности калибровки, поэтому их следует избегать.
Изменение фокусного расстояния незначительно влияет на фокусное расстояние, что может сбить любую предыдущую калибровку. Даже изменения диафрагмы обычно отрицательно сказываются на достоверности калибровки, поэтому их следует избегать.
Для точной калибровки модель камеры лучше всего ограничена, если камера видит цель калибровки, заполняющую большую часть изображения. Говоря популярными, если используется небольшая калибровочная пластина, многие комбинации параметров камеры могут объяснить наблюдаемые изображения. Как правило, калибровочная пластина должна иметь площадь не менее половины доступной площади пикселя при фронтальном наблюдении.
Тип шаблона
За прошедшие годы были введены различные шаблоны, каждый из которых имеет уникальные свойства и преимущества.
Выбор правильного типа начинается с рассмотрения того, какой алгоритм и реализацию алгоритма вы будете использовать. В программном обеспечении, таком как калибратор камеры Calib, и библиотеках, таких как libCalib, OpenCV или MVTec Halcon, есть некоторая свобода в отношении шаблона, и они имеют индивидуальные преимущества и ограничения.
Мишени в виде шахматной доски
Это самый популярный и распространенный рисунок. Кандидаты на углы шахматной доски обычно находятся путем бинаризации изображения с камеры и нахождения четырехугольников (это черные поля шахматной доски). На этапе фильтрации сохраняются только те четырехугольники, которые соответствуют определенным критериям размера и организованы в виде обычной сетки, размеры которой соответствуют размерам, указанным пользователем.
После первоначального обнаружения шаблона расположение углов может быть определено с очень высокой точностью. Это связано с тем, что углы (математически: седловые точки) в основном бесконечно малы и, следовательно, не подвержены смещению при преобразовании перспективы или искажении объектива.
В OpenCV вся шахматная доска должна быть видна на всех изображениях, чтобы ее можно было обнаружить. Обычно это затрудняет получение информации с самых краев изображений. Эти области обычно полезны для получения информации, поскольку они должным образом ограничивают модель искажения объектива.
После обнаружения шахматной доски можно выполнить субпиксельное уточнение для поиска седловых точек с точностью до субпикселя. Это использует точные значения серого пикселей вокруг заданной угловой позиции, и точность намного более точна, чем то, что допускают целочисленные положения пикселей.
Важной деталью в отношении целей шахматной доски является то, что для того, чтобы быть инвариантным к вращению, количество строк должно быть четным, а количество столбцов нечетным, или наоборот. Если, например, оба четны, возникает неоднозначность поворота на 180 градусов. Для калибровки одной камеры это не проблема, но если одни и те же точки необходимо идентифицировать двумя или более камерами (для стереокалибровки), такой неоднозначности быть не должно. По этой причине все наши стандартные цели шахматной доски имеют это свойство четных/нечетных строк/столбцов.
Цели CharuCo
Шаблоны CharuCo преодолевают некоторые ограничения классических шахматных досок. Однако алгоритм их обнаружения несколько сложнее. К счастью, обнаружение CharuCo является частью библиотеки Contrib OpenCV (начиная с OpenCV 3.0.0), что позволяет очень легко интегрировать этот продвинутый метод.
Однако алгоритм их обнаружения несколько сложнее. К счастью, обнаружение CharuCo является частью библиотеки Contrib OpenCV (начиная с OpenCV 3.0.0), что позволяет очень легко интегрировать этот продвинутый метод.
Основным преимуществом CharuCo является то, что все поля световой шашки имеют уникальный код и идентифицируются. Это означает, что для калибровки можно использовать даже частично закрытые или неидеальные изображения с камеры. Например, сильные кольцевые огни могут давать неоднородное освещение на калибровочной мишени (область полузеркального отражения), что может привести к сбою обычного обнаружения шахматной доски. С CharuCo все еще можно использовать оставшиеся (хорошие) обнаружения седловой точки. Локализация седловой точки может быть уточнена с помощью обнаружения субпикселей, как в шахматной доске.
При наблюдениях близко к углам изображения это чрезвычайно полезное свойство. Поскольку цель может быть расположена так, что камера видит ее только частично, мы можем собирать информацию с самых краев и углов изображения с камеры. Обычно это приводит к очень хорошему и надежному определению параметров дисторсии объектива. По этой причине мы настоятельно рекомендуем использовать цели CharuCo, когда доступен OpenCV 3.x.
Обычно это приводит к очень хорошему и надежному определению параметров дисторсии объектива. По этой причине мы настоятельно рекомендуем использовать цели CharuCo, когда доступен OpenCV 3.x.
Естественно, мишени CharuCo можно использовать для стереокалибровки. В этом случае нужно реализовать некоторый код для поиска тех точек, которые были обнаружены в каждой камере по отдельности, и тех, которые были найдены в обеих (пересечение точек).
Цели маркеров шахматной доски
Они основаны на традиционных шахматных досках и могут использовать те же алгоритмы обнаружения. Кроме того, они содержат три круга в центре, что обеспечивает абсолютную привязку даже при частичном просмотре шахматной доски (при условии, что круги видны на всех изображениях). Следовательно, могут быть включены данные с периферии изображения, что гарантирует, что модель подобранной линзы также действительна в этих частях изображения.
Для многих задач стереокалибровки маркерная мишень в виде шахматной доски обладает всеми преимуществами кодированной мишени, такой как ChArUco. Он поддерживается, например. OpenCV 4.5+.
Он поддерживается, например. OpenCV 4.5+.
Круговые сетки
Круговые сетки также являются популярным и очень распространенным дизайном калибровочной мишени, основанным на кругах, либо с белыми кругами на темном фоне, либо с темными (черными) кругами на белом фоне. С точки зрения обработки изображений круги могут быть обнаружены как «капли» на изображении. Некоторые простые условия для этих бинарных областей больших двоичных объектов, такие как площадь, округлость, выпуклость и т. д., могут быть применены для удаления плохих кандидатов в функции.
После нахождения подходящих кандидатов обычная структура признаков снова используется для идентификации и фильтрации шаблона. Определение кругов может быть выполнено очень точно, поскольку могут использоваться все пиксели на периферии кругов, что уменьшает влияние шума изображения. Однако, в отличие от седловых точек на шахматной доске, круги изображаются как эллипсы в перспективе камеры. Эту перспективу можно объяснить с помощью ректификации изображения. Однако, кроме того, неизвестное искажение объектива означает, что круги не отображаются как идеальные эллипсы, что добавляет небольшое смещение. Однако мы можем рассматривать модель дисторсии как локально-линейную (подчиняющуюся перспективному преобразованию/гомографии), поэтому в большинстве объективов эта ошибка очень мала.
Однако, кроме того, неизвестное искажение объектива означает, что круги не отображаются как идеальные эллипсы, что добавляет небольшое смещение. Однако мы можем рассматривать модель дисторсии как локально-линейную (подчиняющуюся перспективному преобразованию/гомографии), поэтому в большинстве объективов эта ошибка очень мала.
Для высокоточной калибровки необходимо учитывать как эллиптическую форму, так и центр проецируемой окружности, особенно при использовании объективов с коротким фокусным расстоянием и больших кругов. OpenCV не делает ни того, ни другого и по умолчанию использует простой детектор больших двоичных объектов для поиска центроидов эллиптических двоичных объектов. Calib Camera Calibrator учитывает эти эффекты и может давать более точные результаты для круглых целей.
Важное различие между симметричными и асимметричными сетками кругов заключается в том, что первые имеют 180-градусную неоднозначность, как описано в разделе «Шахматная доска». Следовательно, для стереокалибровки необходимы асимметричные сетки. В противном случае нет большой разницы в производительности, которую следует ожидать для любого типа.
В противном случае нет большой разницы в производительности, которую следует ожидать для любого типа.
Метод калибровки камеры с использованием концентрических окружностей и линий, проходящих через их центры
На этой странице В методе линия, проходящая через центр концентрических окружностей, используется в качестве шаблона, в котором ортогональные направления могут быть определены по углу окружности, соответствующему диаметру. Используя три линии, проходящие через центр концентрических окружностей, на основе неизменности поперечных отношений изображение в центре концентрических окружностей можно использовать для получения точки схода. Внутренние параметры камеры могут быть вычислены на основе ограничений ортогональных точек схода и отображаемой абсолютной коники. Искажение объектива приводит к смещению точек в шаблоне. В предлагаемом методе мы оптимизируем положения точек искажения таким образом, чтобы они постепенно приближались к идеальным точкам. Смоделированные и реальные эксперименты показывают, что предложенный метод эффективен и осуществим.
Смоделированные и реальные эксперименты показывают, что предложенный метод эффективен и осуществим.
1. Введение
Калибровка камеры является важной темой исследований в области распознавания образов, поскольку она необходима для приложений компьютерного зрения [1–3]. Мэн и Ху [4] использовали круг и несколько линий, проходящих через центр круга, в качестве калибровочного шаблона; однако один круг содержит мало информации. Ву и др. В [5] предложен метод калибровки камеры, основанный на аффинной инвариантности параллельных окружностей. Если сначала вычислить пересечение двух параллельных окружностей для определения точек окружности, то можно определить внутренние параметры. Однако этот метод не может использоваться для определения центра концентрических окружностей и требует не менее трех изображений. А Бин [6] предложил метод вычисления точки схода по теории гармонического сопряжения в проективной геометрии. Внутренние параметры камеры можно было получить по соотношению между точками окружности и изображением абсолютной коники. Кроме того, дисторсия объектива снижает точность калибровки камеры [7]. Следовательно, Рикольф-Виала и Санчес-Сальмерон [8] предложили нелинейный метод, который корректирует изображения на основе инвариантности по отношению друг к другу, хотя этот алгоритм является более сложным. Чтобы устранить недостатки вышеуказанных методов, мы предлагаем метод вычисления внутренних параметров с использованием круга в качестве шаблона, при этом не обязательно знать масштаб круга. На основании того свойства, что угол в круговом сегменте, соответствующем диаметру, равен 90°, если изображение включает две пары ортогональных точек схода, внутренние параметры могут быть рассчитаны для трех изображений. Этот метод упрощает калибровку камеры. Мы также предлагаем новый метод коррекции дисторсии объектива, который корректирует изображения с помощью метода наименьших квадратов, чтобы они соответствовали линии, проходящей через центр концентрических окружностей.
Кроме того, дисторсия объектива снижает точность калибровки камеры [7]. Следовательно, Рикольф-Виала и Санчес-Сальмерон [8] предложили нелинейный метод, который корректирует изображения на основе инвариантности по отношению друг к другу, хотя этот алгоритм является более сложным. Чтобы устранить недостатки вышеуказанных методов, мы предлагаем метод вычисления внутренних параметров с использованием круга в качестве шаблона, при этом не обязательно знать масштаб круга. На основании того свойства, что угол в круговом сегменте, соответствующем диаметру, равен 90°, если изображение включает две пары ортогональных точек схода, внутренние параметры могут быть рассчитаны для трех изображений. Этот метод упрощает калибровку камеры. Мы также предлагаем новый метод коррекции дисторсии объектива, который корректирует изображения с помощью метода наименьших квадратов, чтобы они соответствовали линии, проходящей через центр концентрических окружностей.
Этот документ организован следующим образом. Основополагающая теория представлена в разделе 2. Метод калибровки камеры предлагается в разделе 3, а метод определения изображения центра окружности описан с использованием концентрических окружностей. Предлагаемый метод коррекции дисторсии объектива представлен в разделе 4. В разделе 5 представлены результаты экспериментов по моделированию, чтобы показать, является ли метод, описанный в разделе 4, действительным. Затем проводится эксперимент, сравнивающий этот метод с другими классическими методами. Наконец, в Разделе 6 представлено краткое изложение этого документа.
Основополагающая теория представлена в разделе 2. Метод калибровки камеры предлагается в разделе 3, а метод определения изображения центра окружности описан с использованием концентрических окружностей. Предлагаемый метод коррекции дисторсии объектива представлен в разделе 4. В разделе 5 представлены результаты экспериментов по моделированию, чтобы показать, является ли метод, описанный в разделе 4, действительным. Затем проводится эксперимент, сравнивающий этот метод с другими классическими методами. Наконец, в Разделе 6 представлено краткое изложение этого документа.
2. Предварительные сведения
Пусть обозначают однородные координаты трехмерной точки и обозначают однородные координаты соответствующей точки изображения. Проекционное отношение между этими точками: где — ненулевой масштабный коэффициент и матрица 3 × 4, которая определяется как матрица проекции, которая может быть выражена как — трехмерное вращение, — вектор переноса, — матрица внутренних параметров [1]. ].
].
3. Использование ортогональных точек схода для решения K
3.1. Вычисление изображения центра концентрических окружностей
Окружность пересекает прямую в двух точках, а окружность пересекает прямую в двух точках, как показано на рисунке 1. Можно показать, что центр окружностей находится в середине точка линий. Позвольте представить точки в направлении бесконечности вдоль линии и обозначить линию как линию калибровки.
Предложение 1. На рисунке 1 соответствующие точки , которые являются , и в плоскости изображения, , , и , соответственно. Таким образом, уравнения, описывающие образ центра окружности, имеют вид
Доказательство. Центром окружности является середина отрезков , . Следовательно, в проективной геометрии четыре точки и четыре точки являются гармонически сопряженными соответственно. Таким образом, исходя из инвариантности поперечных отношений [9],
Пусть координаты , и будут , , и , соответственно. Следовательно, на основании предложения 1 уравнение для решения образа центра концентрических окружностей можно записать в виде
3.
 2. Вычисление матриц внутренних параметров
2. Вычисление матриц внутренних параметров Предложение 2. На рис. 2, если известно изображение центра окружности, две пары точек схода в ортогональных направлениях можно определить по трем линиям, проходящим через центр окружности.
Доказательство. На рис. 2 из предложения 1 можно получить образ центра круга и образ трех прямых, проходящих через центр круга. Таким образом, где первый набор ортогональных точек схода и второй набор. Таким образом, можно получить две пары точек схода в ортогональных направлениях.
Образ абсолютной коники есть , который может быть представлен симметричной матрицей: Хартли и Зиссерман [10] установили уравнения связи между образом абсолютной коники и точками схода. Таким образом, Если и , то (9) можно выразить в виде Поскольку имеет шесть неизвестных параметров, необходимо сделать три снимка с разных ориентаций. Вычисляя разложение по сингулярным числам (SVD) матрицы коэффициентов, можно получить. Затем можно определить, решив обратное после разложения Холецкого .
4. Исправление искажения объектива
4.1. Коррекция искажения
В камере-обскуре из-за искажения объектива точка между шаблоном и его изображением имеет позиционное смещение. Поэтому нам нужно исправить точку искажения в исходное положение. На рисунке 1 мы корректируем точку изображения на линии в соответствии с предложением 3 и используем модель дисторсии для расчета коэффициентов радиальной дисторсии.
Предложение 3. Упражнение по исправлению точек изображения и вычислению коэффициентов радиальной дисторсии можно преобразовать в вычисление минимума целевой функции: , где , , и .
Доказательство. точек из линий могут быть извлечены на изображении шаблона, включая точки пересечения между окружностями и линиями, показанными на рисунке 1. Точки могут быть пронумерованы. Точки для находятся в линиях для , которые удовлетворяют где параметры линий для .
Чтобы гарантировать, что точки, извлеченные из изображения, удовлетворяют уравнению линий, целевая функция (12) в сочетании с принципом наименьших квадратов используется для нахождения минимального значения где — количество строк в изображении и — количество точки в каждой строке.
Ин Ван и др. В [7] дисторсия объектива камеры моделировалась как комбинация радиальной и тангенциальной дисторсии, а связь между точкой дисторсии и соответствующей идеальной точкой может быть описана путем создания обратной модели коррекции дисторсии, как в где , и .
Если предположить, что и являются координатами k-й точки искажения и соответствующей идеальной точки, соответственно, в терминах (13), целевые функции будут следующими: Чтобы исправить ошибку от точки искажения до ее идеальной точки, необходимо для минимизации глобальной ошибки. Согласно приведенному выше анализу, объединяя (12) и (14), мы получаем окончательную целевую функцию:
Таким образом, задача коррекции превращается в вычисление минимума конечной целевой функции. Процесс минимизации может быть выполнен с использованием алгоритма Левенберга-Марквардта (LM). Исходные параметры линии можно получить с помощью точки искажения, которая извлекается из изображения. В процессе итерации, если точка искажения постепенно приближается к своей идеальной точке, итерация завершится и будет определено линейное уравнение. Таким образом можно получить минимум конечной целевой функции и коэффициентов радиальной дисторсии. При этом линии и точки на изображении шаблона можно корректировать.
Таким образом можно получить минимум конечной целевой функции и коэффициентов радиальной дисторсии. При этом линии и точки на изображении шаблона можно корректировать.
4.2. Шаги алгоритма
Шаг 1. С помощью камеры сделайте три изображения с разных ориентаций.
Шаг 2. Извлеките точки из бинарного изображения [11].
Шаг 3. После исправления точек искажения с применением Предложения 3, на основании Предложения 1 можно получить изображение центра концентрической окружности с помощью (6).
Шаг 4. Найдите точки схода, используя (7).
Шаг 5. Решить полученное (10) методом SVD для . Определить путем решения обратного после факторизации Холецкого .
5. Эксперименты
Для подтверждения эффективности метода и проверки чувствительности метода к шуму были проведены как смоделированные, так и реальные эксперименты. В этом разделе представлены пять реальных экспериментов: метод Менга [4], в котором используется один круг и линия, проходящая через центр круга; метод Ву [5], использующий параллельные окружности; наш метод; наш метод, который применяется после коррекции изображения по методу Рикольфа-Виалы [8] и калибровки камеры по нашему методу; наш метод+, который применяется после коррекции изображений методом, предложенным в этом исследовании, и калибровки камеры по нашему методу.
5.1. Simulation Experiment
Обратите внимание, что дисторсия объектива не учитывалась при моделировании. Внутренние параметры камеры принимались равными . Целью этого моделирования является определение влияния шума на внутренние параметры камеры. Мы применили три метода: наш метод, метод Мэн и метод Ву. Каждая точка включает гауссовский шум, в котором дисперсия находится в диапазоне от 0 до 1,5. Для каждого значения было проведено двадцать независимых экспериментов и получены средние значения собственных параметров камеры. Результаты моделирования трех методов были сравнены и проанализированы, и результаты показаны на рисунке 3. Как показано на рисунке, наш метод был стабильным.
5.2. Реальный эксперимент
В реальном эксперименте разрешение камеры составляло 1280 × 960 пикселей. Изображения шаблона, содержащего две концентрические окружности и три линии, проходящие через их центр, показаны на рис. 4(а)–4(в). Исправленные изображения показаны на рисунках 4(d)–4(f).
После коррекции исходного изображения изображение шаблона было подвергнуто серой обработке. На рисунке 5(а) показаны точки, извлеченные из бинарного изображения. Точно так же мы выбрали два дополнительных изображения с разной ориентацией при извлечении точек на рисунках 5(b)-5(c). Затем мы нашли внутренние параметры, используя следующие методы: метод Менга, метод Ву, наш метод+ и наш метод. Результаты экспериментов представлены в таблице 1.
Чтобы проверить правильность внутренних параметров камеры в таблице 1, данные в таблице 1 были использованы для реконструкции трехмерной информации [12] шахматной доски на рисунке 6. Сорок пять характерных точек, соответствующих пяти строкам и из каждого изображения было выбрано девять столбцов шахматной доски. Результаты реконструкции показаны на рис. 7. Затем было рассчитано среднее значение угла в параллельных направлениях с данными с рис. 7. Аналогичным образом было получено среднее значение угла в ортогональных направлениях. В таблице 2 приведены результаты измерения угла с реальными данными, как показано на рисунке 7.
Реальные углы равны 0° для параллельных прямых и 90° в ортогональном направлении на шахматной доске. Из таблицы 2 можно сравнить абсолютную погрешность экспериментальных результатов с реальным углом. Понятно, что абсолютная ошибка нашего метода+ была меньше. Таким образом, наш метод+ оказался осуществимым и эффективным.
6. Выводы
В этом исследовании, основанном на теории гармонических сопряжений в проективной геометрии в сочетании с точкой схода и центром концентрических окружностей, предлагается метод калибровки, использующий окружности и прямую. Изображение центра окружности можно легко вычислить с помощью концентрических окружностей, не требуя знания радиуса и местоположения центра. Три изображения могут быть получены с разных ориентаций шаблона, а внутренние параметры могут быть вычислены с использованием линейного метода. Преимуществом предлагаемого процесса является то, что он не требует сложных вычислений.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов в связи с публикацией данной статьи.
Благодарности
Эта работа была частично поддержана двумя грантами Национального фонда естественных наук Китая (№ 61663048 и № 11361074).
Ссылки
-
Ю. Чжан, Л. Чжоу, Х. Лю и Ю. Шан, «Гибкая онлайн-калибровка камеры с использованием линейных сегментов», Journal of Sensors , том. 2016 г., идентификатор статьи 2802343, 16 страниц, 2016 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
-
З. Эль Кадмири, О. Эль Кадмири, Л. Масмуди и М. Н. Баргач, «Новый солнечный трекер, основанный на всенаправленном компьютерном зрении», Journal of Solar Energy , vol. 2015 г., 6 страниц, 2015 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
-
Й. Ли и Дж. Лу, «Минимизация полной вариации на основе многоградиентности для улучшенного устранения размытия при расфокусировке многонаправленных изображений», Международный журнал оптики , том.
 2014 г., идентификатор статьи 732937, 9 страниц, 2014 г.
2014 г., идентификатор статьи 732937, 9 страниц, 2014 г. Посмотреть по адресу:
Сайт издателя | Google Scholar
-
X. Meng и Z. Hu, «Новый простой метод калибровки камеры, основанный на круглых точках», Pattern Recognition , vol. 36, нет. 5, стр. 1155–1164, 2003.
Посмотреть по адресу:
Сайт издателя | Google Scholar
-
Ю. Ву, Х. Чжу, З. Ху и Ф. Ву, «Калибровка камеры на основе квазиаффинной инвариантности двух параллельных окружностей», в Компьютерное зрение — ECCV 2004 , том. 3021 of Lecture Notes in Computer Science , стр. 190–202, Springer Berlin Heidelberg, Berlin, Heidelberg, 2004.
Посмотреть по адресу:
Сайт издателя | Google Scholar
-
З. Бин, «Определение внутренних параметров и параметров положения камеры на основе концентрических окружностей», в материалах Proceedings of the in Proceeding of the IEEE International Conference on Digital Manufacturing & Automation (ICDMA’10) , vol.
 1, стр. 518–521, Хунань, Китай, 2010 г.
1, стр. 518–521, Хунань, Китай, 2010 г. Просмотр по адресу:
Google Scholar
-
Дж. Ван, Ф. Ши, Дж. Чжан и Ю. Лю, «Новая модель калибровки искажения объектива камеры», Распознавание образов , том. 41, нет. 2, стр. 607–615, 2008 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
-
К. Рикольф-Виала и А.-Дж. Санчес-Сальмерон, «Надежная метрическая калибровка нелинейных искажений объектива камеры», Распознавание образов , том. 43, нет. 4, стр. 1688–169.9, 2010.
Посмотреть по адресу:
Сайт издателя | Google Scholar
-
J. G. Semple and G. T. Nokebone, Algebraic Prodictive Geometry , Clarendon Press, Oxford, UK, 1952.
View At:
Mathscinet
-
.
 R. Hartley и A. Zissscinet
R. Hartley и A. Zissscinet -
. R. Hartle Geometry in Computer Vision , Cambridge University Press, UK, 2003.
Просмотр по адресу:
MathSciNet
-
П. Л. Сюй, «Исследование технологии точных измерений микроскопических изображений», Advanced Materials Research , vol. 798, стр. 638–642, 2013.
Посмотреть по адресу:
Сайт издателя | Google Scholar
-
Z. Zhang, «Новый гибкий метод калибровки камеры», IEEE Transactions on Pattern Analysis and Machine Intelligence , vol. 22, нет. 11, стр. 1330–1334, 2000.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Copyright
Copyright © 2018 Yue Zhao et al. Это статья с открытым доступом, распространяемая в соответствии с лицензией Creative Commons Attribution License, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии надлежащего цитирования оригинальной работы.